شناخت و کنترل موتورهای قدمی با پله ای (Step Motor) :
این موتورها همانند دیگر انواع موتور دارای یک قسمت ثابت ( استاتور) بیرونی و بک قسمت چرخنده ( روتور ) درونی میباشند
و چرخش آنان نیز توسط نیروی الکترومغناطیسی انجام میشود. تفاوت آنان با انواع دیگر در آن است که چرخش
بصورت دایم انچام نمی شود بلکه چناچه از نام آن معلوم است بصورت مرحله ای یا قدمی صورت میگیرد.
تفاوت دیگر اینست که در این نوع معمولا بوبین تولیدکننده نیروی مغناطیس در استاتور قرار دارد و روتور از یک قطعه
مغناطیس یا آهن نرم تشکیل میشود. البته استثنا هم وجود دارد که استاتور ثابت در مرکز و روتور متحرک در خارج قرار دارد,
این نوع را میتوان در پخش کننده CD یا DVD یافت.
ساختار فیزیکی این نوع از موتور ها بطور کلی 3 نوع است.
- یکی نوع (reluctance motor) ( موتور مقاومت مغناطیسی ) است.
که در این نوع روتور از یک قطعه
آهن نرم بصورت یک سیلندر دندانه دار تشکیل شده و قابلیت نگهداری میدان مغناطیس را ندارد و اگر در حالتی که بوبین
استاتور تحریک نشده(جریانی از آن عبور نمی کند) یک نیروی خارجی به روتور وارد شود روتور تغیر مکان میدهد.
تعداد دندانه ها یا قطب های روتور مساوی با قطب های استاتور نیست.
با تحریک یکی از بوبین ها در استاتور, روتور در حالتی قرار میگیرد که کمترین مقاومت مغناطیسی را برای عبور شار مغناطیسی
از یک قطب استاتور به دیگری را داشته باشد. ( نام این نوع از موتور به خاطر همین خاصیت است)
در این نوع موتور بر عکس دو نوع دیگر جهت جریان در بوبین مهم نیست چون روتور مغناطیسی نیست و فقط وظیفه دارد که
شارهای مغناطیسی را از راهی که کمترین مقاومت مغناطیسی را دارد عبور دهد.
 در تصوبر مقابل برای حرکت در جهت عقربه ساعت, اول بوبین A و دوم بوبین C و سوم بوبین B را بترتیب فعال میکنیم.
در تصوبر مقابل برای حرکت در جهت عقربه ساعت, اول بوبین A و دوم بوبین C و سوم بوبین B را بترتیب فعال میکنیم.
در عمل تعداد دندانه های روی روتور و قطبهای استاتور بسیار زیادتر هستند و دندانه های روتور و استاتور بین دو
قطب استاتور به اندازه نصف پهنای دندانه با هم جابجایی دارند و این جابجایی اندازه قدم (step) را تعیین میکند.
نکات مثبت این نوع موتور هزینه کم تولید و دقت قدم زیاد (زاویه کم) و سرعت زیاد است.
این نوع موتورها معمولا دارای 3 بوبین یا 5 بوبین هستند.
نکته منفی نیروی چرخنده گی یا نیروی گشتاور ( Torque ) کم آن است.
- نوع دیگر (permanent magnet motor) است.
 در این نوع, روتور از یک مغناطیس دایمی ( معمولا فریت Ferrit) به شکل سیلندر که در امتداد محیط آن قطبهای مغناطیسی
متفاوت دارد تشکیل شده است. به همین دلیل اینگونه موتور زمانی که بوبین استاتور تحریک نشده دارای نیروی نگهدارنده است
که باعث میشود روتور حرکت نکند( البته در محدوده ای که سازنده آنرا تعریف کرده است)
و قطب های استاتور هر یک بوبین مجزای خود را دارد.
در این نوع, روتور از یک مغناطیس دایمی ( معمولا فریت Ferrit) به شکل سیلندر که در امتداد محیط آن قطبهای مغناطیسی
متفاوت دارد تشکیل شده است. به همین دلیل اینگونه موتور زمانی که بوبین استاتور تحریک نشده دارای نیروی نگهدارنده است
که باعث میشود روتور حرکت نکند( البته در محدوده ای که سازنده آنرا تعریف کرده است)
و قطب های استاتور هر یک بوبین مجزای خود را دارد.
نکته مثبت این نوع نیروی گشتاوری زیاد آن است.
نکته منفی, زاویه زیاد قدم است.(از نظر تکنیکی ساخت تعداد زیادی قطب در روتور محدود میباشد)
- نوع دیگر (hybrid motor) است.
 این نوع تلفیقی از دو موتور قبلی است بدین صورت که روی روتور دو استوانه دندانه دار
از آهن نرم که در مقابل هم به اندازه نصف پهنای دندانه جابجا هستند قرار میگیرد.
این نوع تلفیقی از دو موتور قبلی است بدین صورت که روی روتور دو استوانه دندانه دار
از آهن نرم که در مقابل هم به اندازه نصف پهنای دندانه جابجا هستند قرار میگیرد.
قطبهای مغناطیسی در روتور در امتداد محور آن قرار دارند و هر یک از استوانه ها یکی از قطب ها را تشکیل میدهد.
اگر بوبین استاتور تحریک شود این استوانه ها خود را با قطبهای ایجاد شده توسط استاتور تطبیق میدهند.
این نوع موتور دارای نیروی گشتاوری زیاد و تعداد قدم زیاد یا زاویه قدم کمتری (step) است.
امروزه اکثر موتور ها از این نوع هستند.
نکته مثبت این نوع نیروی گشتاوری دقت قدم زیاد آن است.
نکته منفی تلفات مغناطیسی در بین دندانه ها است.
**********
موتورهای قدمی دارای 2 نوع از رزنانس با نوسان هستند که رزنانس در محدوده پایین فرکانس (فرکانس صوتی) تقریبا چند صد هرتز با ساختمان
مکانیکی آنها و رزنانس در فرکانسهای بالا بخاطر خاصیت الکتریکی آنان است. در حالت رزنانس روتور حرکت نمیکند بلکه بین
دو قطب استاتور تکان میخورد. این رزنانس ها باعث میشود که موتور نیروی گشتاوری کمتری داشته باشد یا بطور کلی آنرا
از دست بدهد و قادر به چرخش نباشد.
**********
 اشکال متفاوت اتصالات موتورهای Hybrid.
اشکال متفاوت اتصالات موتورهای Hybrid.
در نوع 3 و 4 کنترل میتواند به هر دو روش باشد.
در موتورهای 6 و 8 سیم (نوع 3 و 4) اگر مایل باشیم که آنها را بصورت سری یا موازی استفاده کنیم باید به این نکته توجه کنیم که:
اگر بوبین ها را بطور سری یا متوالی وصل میکنیم مقاومت اهمی (R) دو برابر و خاصیت سلفی (L) چهار برابر میشود,
بنابراین باید جریان بوبین را به اندازه رادیکال 2 (1.41) کمتر کرد تا توان تلافاتی موتور از حد مجاز بیشتر نشود.(P = I^2 * R)
در حالتی که دو بوبین را موازی میکنیم R نصف میشود ولی L تغییر نمی کند. در این حالت جریان را به
اندازه رادیکال 2 (1.41) باید اضافه کرد
دلیل اینکه L چهار برابر میشود این است که این سلف ها مجزا نیستند بلکه روی یک هسته مشترک پیچیده شده اند و طبق فرمول
سلف
L = N^2 * (µ*A)/l
سطح و طول تغییر نمی کند ( هسته مشترک) ولی تعداد دور سیم پیچ بصورت توان 2 تغییر میکند.
و در صورت موازی بودن تعداد دور سیم پیچ تغییر نمی کند و بنابراین L ثابت می ماند.
**********
موتورهای قدمی بطور کلی به دوصورت کنترل میشوند یکی دوقطبی ( bipolar ) و دیگری تک قطبی ( unipolar ) است.
علت نامگذاری آنان بخاطر جهت ولتاژ در اتصالات بوبین آنان است.
در موتورهای دوقطبی ولتاژ روی بوبین تغیر جهت میدهد یعنی هر سر بویبن میتواند در زمانی مثبت باشد و در زمان دیگر منفی.
این نوع میتواند دارای 4 , 6 یا 8 اتصال باشد.
در نوع تک قطبی این ولتاژ همیشه در یک جهت است مثلا سر مشترک (وسط) همیشه به منبع تغذیه مثبت متصل میشود. .
این نوع میتواند دارای 5 , 6 یا 8 اتصال باشد.
**********
پارامتر اصلی در این نوع از موتورها:
تعداد (Step) یا اندازه قدم آن است. انواعی که رایج هستند معمولا دارای 200 قدم و بنابراین دارای زاویه قدمی 1.8 درجه هستند.
حداکثر ولتاژ روی بوبین (nominal voltage)
حداکثر جریان در هر بوبین (phase current)
مقدار خاصیت سلفی هر بوبین (Winding inductance)
مقدار مقاومت اهمی هر بوبین (Winding resistance)
نیروی گشتاور موتور (torque)
نیروی گشتاور چرخشی نگهداری محور موتور در حالت ساکن (holding torque)
اینرسی روتور (Rotor inertia)
مقدار مجاز حرارت موتور (Motor temperature, winding temperature)
و مشخصات مکانیکی آن مانند وزن و اندازه های آن
**********
تولید حرکت:
مکانیسم حرکتی این موتورها را امروزه به این 3 صورت نامگذاری میکنند.
در حقیقت ولی نیم قدم ( half step ) هم از نوع میکروقدم با ضریب 1/2 است.
مدار کنترل باید قادر باشد که هر 3 نوع حرکت را انجام دهد.
- - قدم کامل ( full step )
- - نیم قدم ( half step )
- - میکروقدم ( micro step )
برای اینکه روتور حرکت کند ما میتوانیم در هر لحظه ( قدم ) یا یک بوبین (phase) را با انرژی تغذیه کنیم یا هر دو بوبین را.
در حالت اول روتور همیشه مقابل قطب فعال استاتور قرار میگیرد. نام این نوع از قدم کامل
( Wave Drive = Fullstep(one phase ON)) است ولی معمولا استفده نمیشود زیرا
نیروی گشتاوری نصف خواهد بود.
در حالت دوم روتور همیشه بین دو قطب فعال استاتور قرار میگیرد. نام این نوع از قدم کامل
(Fullstep(two phase ON)) است در این حالت
نیروی گشتاوری حداکثر خواهد بود.
برای فهم روش کنترل در زیر فرض میکنیم که موتور ما دارای 4 قدم است یا زاویه قدمی آن 90 درجه است.
در تصاویر زیر علامت + و - جهت ولتاژ را نشان میدهد.
 Wavedrive : در این تصاویر در هر لحظه فقط یک بوبین (phase) بطور جداگانه به منبع تغذیه وصل یا با انرژی تغذیه میشود
و بنابراین دارای این چهار حالت خواهیم بود.
Wavedrive : در این تصاویر در هر لحظه فقط یک بوبین (phase) بطور جداگانه به منبع تغذیه وصل یا با انرژی تغذیه میشود
و بنابراین دارای این چهار حالت خواهیم بود.
 این شکل پالس و مکان بردار جریان بوبین است.
این شکل پالس و مکان بردار جریان بوبین است.
**********
 قدم کامل ( full step ) :
قدم کامل ( full step ) :
در این تصاویر در هر لحظه هر دو بوبین بطور همزمان به منبع تغذیه وصل میشودو بنابراین دارای چهار حالت زیر خواهیم بود.
**********
 نیم قدم ( half step ) :
نیم قدم ( half step ) :
از تلفیق هر دو حالت بالا حالت نیم قدم حاصل میشود.
در این حالت نیروی گشتاوری متغیر خواهد بود. در یک قدم نصف و در قدم بعدی حداکثر است.
همانطور که اشاره شد این در حقیقت میکروقدم با ضریب 1/2 (N=2) میباشد.
**********
 میکروقدم ( micro step ) :
میکروقدم ( micro step ) :
همانطور که دیده میشود اختلاف فاز یا زاویه بین جریان های بوبین ها °90 است.
در میکروقدم این فاصله را به تعداد زیادتری تقسیم میکنند.
این بدین معنی است که پرش از یک قدم به قدم بعدی بطور ناگهانی صورت نمگیرد, بلکه بصورت کسری از قدم صورت میگیرد.
بستگی به اینکه این فاصله °90 را به چند قسمت تقسیم کنند نوع میکروقدم هم تغییر میکند.
این تقسیم قدم ( Step/N ) معمولا از N=2 تا N=256 است.
مزیتهای استفده از میکروقدم در این است که دقت قدم یا زاویه قدم را بیشتر میکند, اغتشاش صوتی موتور و تکان (ویبراسیون)
را کاهش میدهد و از رزونانس موتور جلوگیری میکند و بهمین دلیل عمر موتور را بالا میبرد.
نکته منفی آن در پایین آوردن سرعت موتور و نیروی گشتاوری (30% کمتر از قدم کامل) میباشد.
 میکروقدم با 1/4 قدم :
میکروقدم با 1/4 قدم :
فاصله قدم یا زاویه آن برابر است با
90°/4 = 22,5°
 میکروقدم با 1/8 قدم :
میکروقدم با 1/8 قدم :
فاصله قدم یا زاویه آن برابر است با
90°/8 = 11,25°
امروزه مدارات کنترل تا 1/256 قدم را هم انجام میدهند ولی برای بیشتر کارها حداکثر تا 1/32 قدم کافی است.
در میکروقدم این زاویه ها را در جدولی قرار میدهند و یک تبدیل کننده آنالوگ به دیجیتال (ADC) از آن برای تولید
ولتاژ رفرنس برای مقایسه و کنترل جریان استفاده میکند.
این ولتاژ رفرنس معمولا توسط یک موج PWM که Duty Cycle آن بر حسب جدول تغییر میکند و با استفاده از یک فیلتر تولید میشود.
در میکروقدم برای اینکه نیروی گشتاوری بیشتری داشته باشیم هر قدم را به دو قسمت تقسیم میکنند و یکی از دو بوبین را
با حداکثر جریان مجاز تغذیه و دیگری را توسط سینوس و یا کسینوس (میکروقدم) تغذیه میکنند.
در این صورت بطور متوسط نیروی گشتاوری بیشتری خواهیم داشت.
**********
روش های الکتریکی کنترل :
 تعریف فیزیکی و نمودار ولتاژ و جریان یک بوبین یا سلف بدین شکل است:
تعریف فیزیکی و نمودار ولتاژ و جریان یک بوبین یا سلف بدین شکل است:
VL = L * dI / dt : (1)
در اینجا :
VL , ولتاژ روی سلف
dI/dt , تغییرات جریان بر روی زمان
L , خاصیت سلفی (القایی)
اگر معادله (1) را بدینصورت بنوسیم:
dI = ( VL/L ) * dt : (2)
شبیه یک معادله خطی ( y = mx ) است با شتاب m = VL/L و اگر در این معادله برای جریان مقدار حداکثر آنرا قرار دهیم میتوانیم
زمان لازم برای رسیدن به این جریان را محاسبه کنیم.
فرض میکنیم که موتور ما دارای این مشخصات برای یک بوبین (فاز) است:
مقدار L برابر L = 2,8 mH
مقاومت اهمی بوبین آن R = 0,36 Ω .
حداکثر جریان مجاز برای آن IN = 5 A آمپر است
و سازنده مقدار ولتاژ را بین 24 تا 50 ولت تعیین کرده است.
اگر ولتاژ 50V را برای تغذیه در نظر بگیریم,حداکثر جریان در بوبین برابر است با :
Imax = VL / R = 50V / 0,36Ω = 138,9 A
و مقدار VL/L برابر است با :
VL/L = 50V / 2,8mH = 17857,142 [A/S]
با قرار دادن این دو عدد در معادله (2) به زمان dt = 0,0077 S خواهیم رسید که این زمان را ثابت زمانی (τ, تاو)
سلف میخوانند. تعریف آن چنین است :
τ = Imax / ( VL/L ) = ( VL/R ) / ( VL/L ) = L / R [S]
این زمانی است که معادله (2) خط Imax را قطع میکند.
در واقعیت جریان سلف بصورت خطی تغییر نمی کند (بخاطر ویژه گی خودالقایی) بلکه با تابع-طبیعی (e-function) تغییر میکند.
این معادله جریان در زمان وصل کردن ولتاژ روی بوبین یا سلف است:
(3): IL(t) = Imax * ( 1 - e^( -t/τ ) )
در معادله (3) در زمان t=τ جریان برابر با IL(t) = Imax * 0.63 است.
و این بدین معنی هست که جریان بوبین در زمان t=τ به 63% جریان حداکثر میرسد.
|
اکنون با این توضیحات اندک میتوان به اولین روش کنترل پرداخت.
نام این روش کنترل با ولتاژ ٍثابت (ConstantVoltage) است:
همینطور که از نامش پیداست با قراردادن یک ولتاژ ثابت روی بوبین انجام میگیرد, این ولتاژ باید طوری در نظر گرفته
شود که اگر موتور ایستاده باشد,جریان در آن از حداکثر جریان مجاز (IN) بیشتر نشود زیرا در این حالت حداکثر توان بصورت توان
تلفاتی در مقاومت اهمی بوبین تلف میشود و باعث گرم شدن موتور و پایین آوردن عمر مفید آن خواهد شد.
در موتور فرضی بالا این ولتاژ باید برابر V = 5A * 0,360Ω = 1,8 V باشد.
با توجه به معادله (3) در زمان t=τ جریان به مقدار IL = 5A * 0,632 = 3,16 A
رسیده و بنابراین نیروی گشتاوری نیز کمتر خواهد بود.
برای حداکثر نیروی گشتاوری باید جریان به 5 آمپر برسد, برای این باید حداقل به اندازه
t=5*τ زمان بگذرد و این یعنی حداکثر سرعت هم پایین میاید.(حداقل پهنای پالس قدم
یا Step )
برای اینکه در زمان τ جریان به 5 آمپر برسد باید ولتاژ تغذیه را به اندازه
Vb = VL + ( 3,16A * 0,360 ) = 1,8V + 1,138V = 2,938V
بالا ببریم, در این حالت حداکثر گشتاوری را خواهیم داشت ولی
اگر موتور ساکن باشد جریان آن از حد مجاز بیشتر خواهد بود!
Imax = VL / Rdc = 2,938V / 0,360Ω = 8,16A
مدارات کنترل برای رفع این نقایص معمولا از یک مقاومت سری (پشت سر هم) با Rdc و با از دو ولتاژ تغذیه
استفاده میکنند.
 با توجه به تعریف ثابت زمانی τ ( τ = L / Rdc ), با اضافه کردن مقاومت مقدار τ کمتر شده و سرعت بالا میرود.
با توجه به تعریف ثابت زمانی τ ( τ = L / Rdc ), با اضافه کردن مقاومت مقدار τ کمتر شده و سرعت بالا میرود.
τ = L /(Rdc + Rv)
نکته منفی آن اینست که راندمان پایین میاید زیرا در این مقاومت مقداری توان تلف میشود بدون اینکه از این توان
استفاده شود.
اگر این تفاوت ولتاژ را با فاکتور n نشان دهیم Vb1 = n*Vb
و از فرمول تقسیم کننده ولتاژ
استفاده کنیم, رابطه های فوق را خواهیم داشت.
با توجه به اینکه
Imax = Vb1 / ( Rdc+Rv ) = n * Vb / ( Rdc+Rv ) = 8,16A
Vb1/Vb = ( Rdc+Rv ) / Rdc
n*Vb / Vb = 1 + ( Rv/Rdc )
Rv = ( n-1 ) * Rdc
τ = L / ( Rdc + Rv )
τ = L / ( n*Rdc )
|
|
این تصویر شبیه سازی با n=3 است:
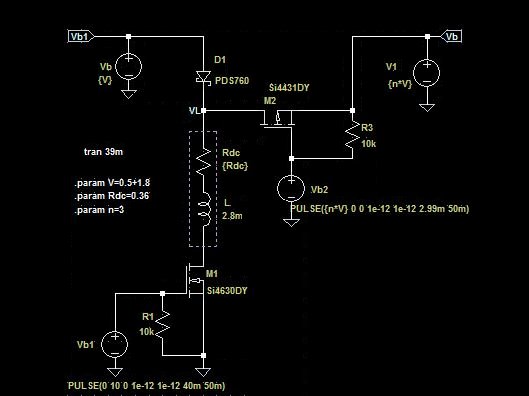
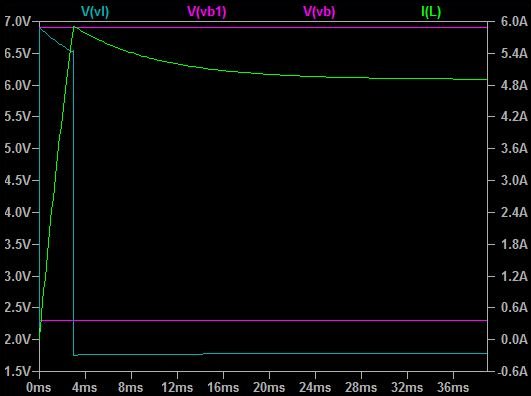 در حالت دوم با دو ولتاژ متفاوت مقدار جریان را در حد مجاز محدود میکنند, بدینصورت که اول با ولتاژ بالا شروع میکنند
و زمانی که جریان به حد مجاز میرسد ولتاژ دوم را وصل میکنند. این ولتاژ در حدی هست که جریان به اندازه ای میشود که
محور موتور توسط نیروی بار مکانیکی موجود تغییر نکند.
در حالت دوم با دو ولتاژ متفاوت مقدار جریان را در حد مجاز محدود میکنند, بدینصورت که اول با ولتاژ بالا شروع میکنند
و زمانی که جریان به حد مجاز میرسد ولتاژ دوم را وصل میکنند. این ولتاژ در حدی هست که جریان به اندازه ای میشود که
محور موتور توسط نیروی بار مکانیکی موجود تغییر نکند.
در عمل امروزه فقط در موارد بخصوصی از این روش استفاده میشود.
روش سوم که امروزه متداول است روش کنترل جریان است.(Chopper)
در این روش با مقایسه جریان, وقتی که بحد مچاز رسیده ولتاژ را قطع میکنند و وقتی که جریان کمی کمتر شد دوباره آنرا وصل میکنند.
این تصویر اصولی یکی از روشهای متداول است:
در اینجا شبیه سازی شکل جریان و ولتاژ روی سلف را میبینید.
**********
صفحه بعدی 

|